Within the framework of the German Research Foundation (DFG), the Technical University of Braunschweig and the Technical University of Munich were successful in establishing a Collaborative Research Center called “Additive Manufacturing in Construction (AMC).” The first phase of the project, entitled "The Challenge of Large Scale,” started in 2020. The aim of this project is “to create the basic conditions for the introduction of additive manufacturing in construction, and thus to pave the way for the use of resource-efficient constructions with a high level of design freedom.”

Surveying engineering (geodetic surveying, photogrammetry, laser scanning and GNSS) plays a major role in one of the sub-projects (C06) called “Integration of Additive Manufacturing in the Construction Process”. The project explores how additive manufacturing can improve construction efficiency and reduce costs at various scales, such as component fabrication and building construction, using techniques like in-situ printing, geometric inspection, and mixed reality.
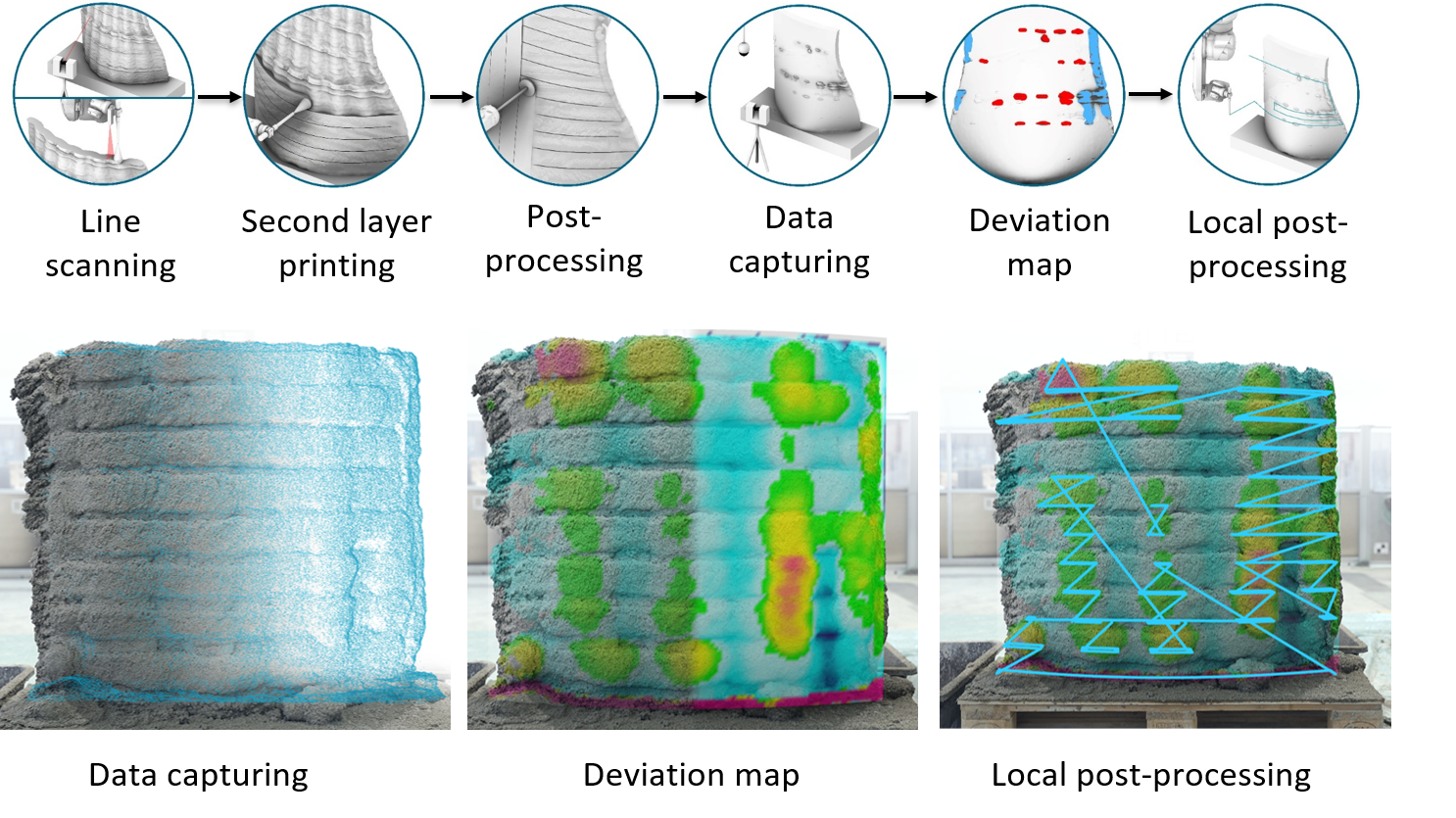
The inspection strategy is implemented through an automated workflow for quality control, which involves integrating detailed as-printed information into the Fabrication Information Model. We conducted a thorough analysis of the multi-printing stages and identified the importance of non-destructive quality control to ensure that the printing production meets the desired specimen outcome.
Based on the results from the quality checks, path planning is generated to effectively address any deviations or defects from the previous stage while proceeding to the next printing stage. This helps to maintain the desired quality throughout the fabrication process.
Lastly, the information flow serves as a bridge between the digital and physical worlds, facilitating seamless communication and data exchange between the two domains.
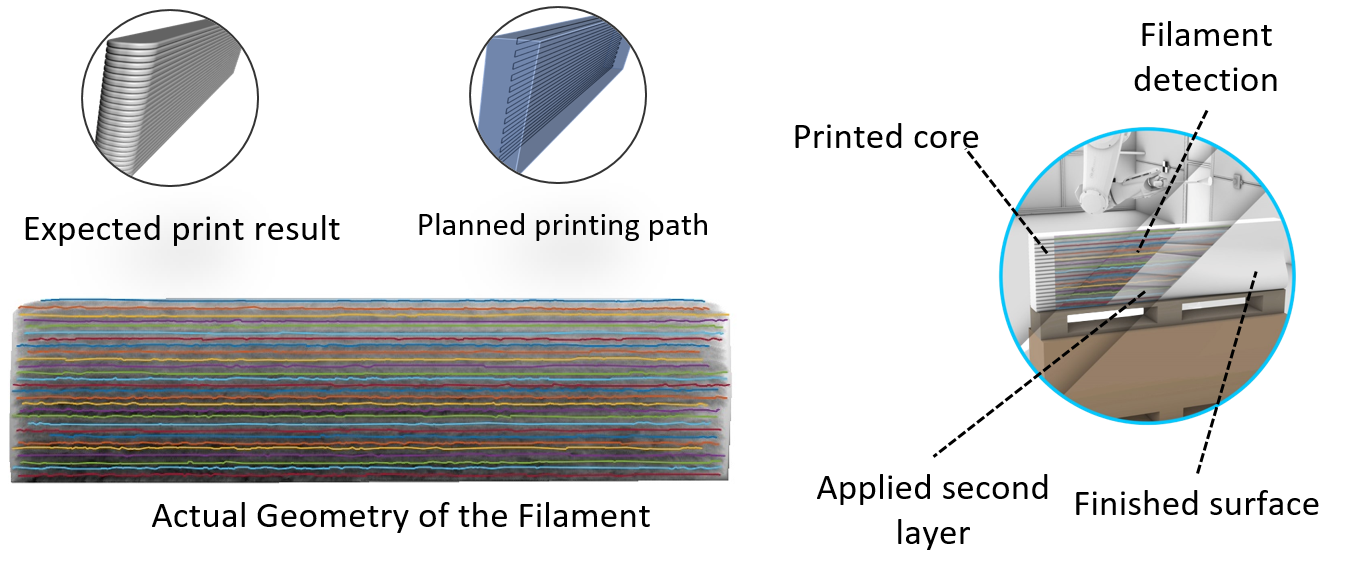
The filament plays a critical role as well in the 3D printing process as its shape can be influenced by various factors including material mix, nozzle distance and diameter, extrusion rate, pumping pressure, robot speed, and airflow pressure, affect its shape.
Principal Investigator C06: Prof. Dr.-Ing. Markus Gerke,
Prof. Dr.-Ing. Patrick Schwerdtner,
Jun.-Prof. Dr. sc. ETH. Norman Hack
Associated researcher: Dr.-Ing. Mehdi Maboudi,
Staff/PhD student: Karam Mawas,
