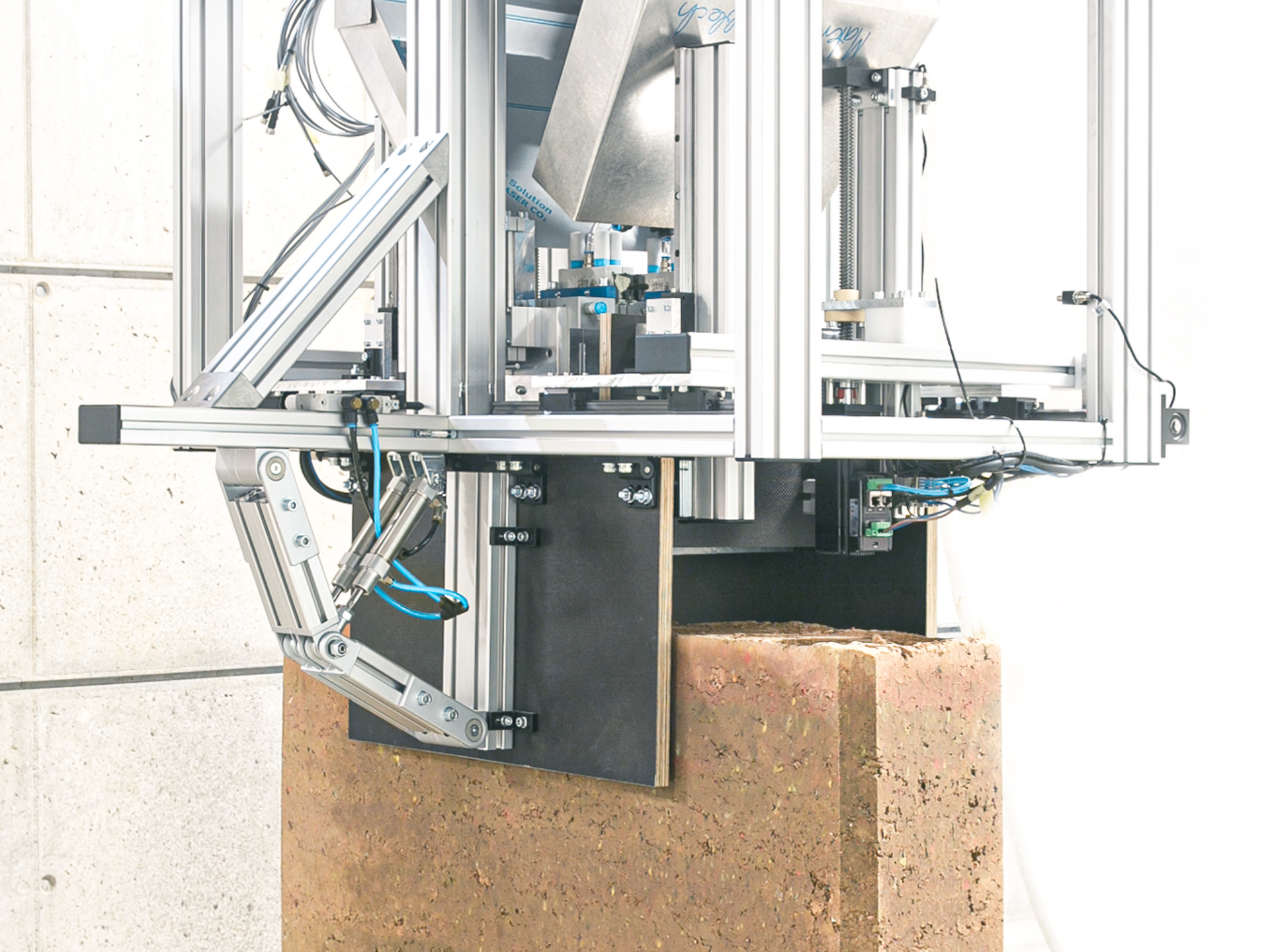



Since 2017, the Institute of Structural Design (ITE) at TU Braunschweig has been conducting pioneering research on robotic fabrication of rammed-earth components. Building on these extensive preliminary studies, the current project aims to advance robotic rammed-earth fabrication from a controlled laboratory environment into a mobile, construction-site-ready production system. This transition requires a complete redesign of the existing fabrication setup to meet the demands of real-world building conditions.
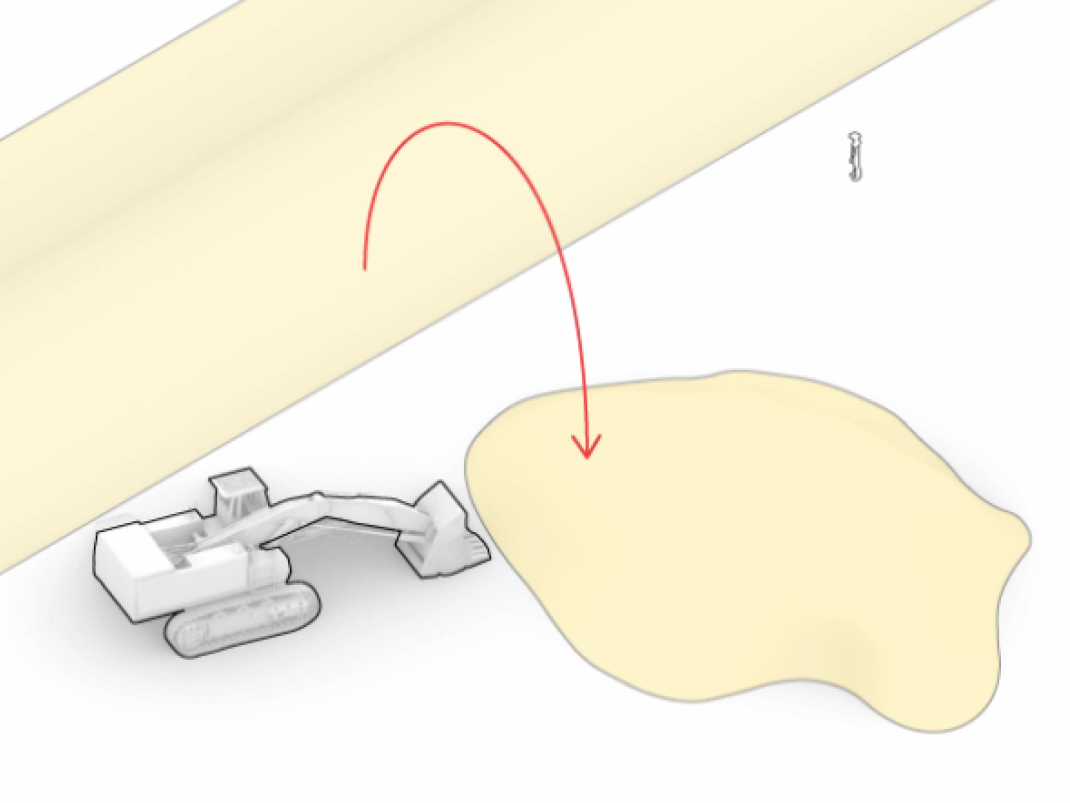
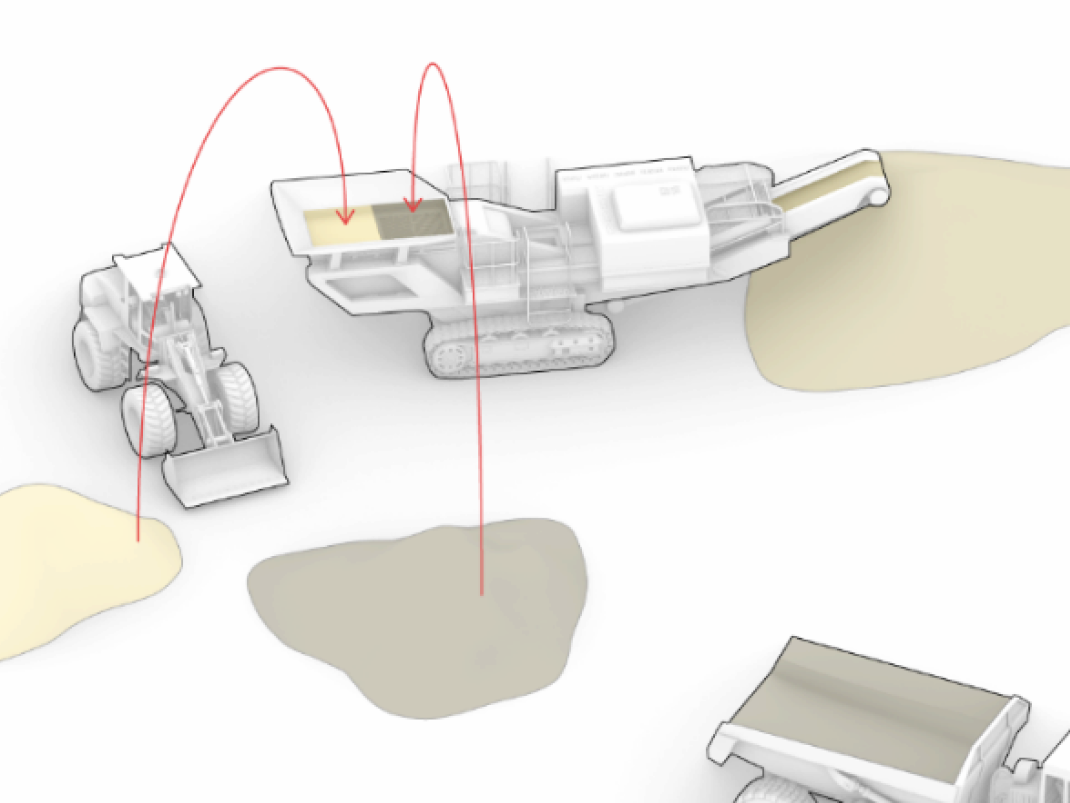
A key focus of the project is the development of a mobile robotic system capable of producing rammed-earth elements directly on site. Unlike stationary fabrication, where standardized and pre-processed materials are used, construction-site production must rely on local soils with varying properties. To enable this, the project explores automated processes for mixing, conveying, and feeding the material into the robotic compaction system. Ensuring consistent fabrication quality under variable environmental conditions—temperature, humidity, and ground composition—is an essential part of this research.
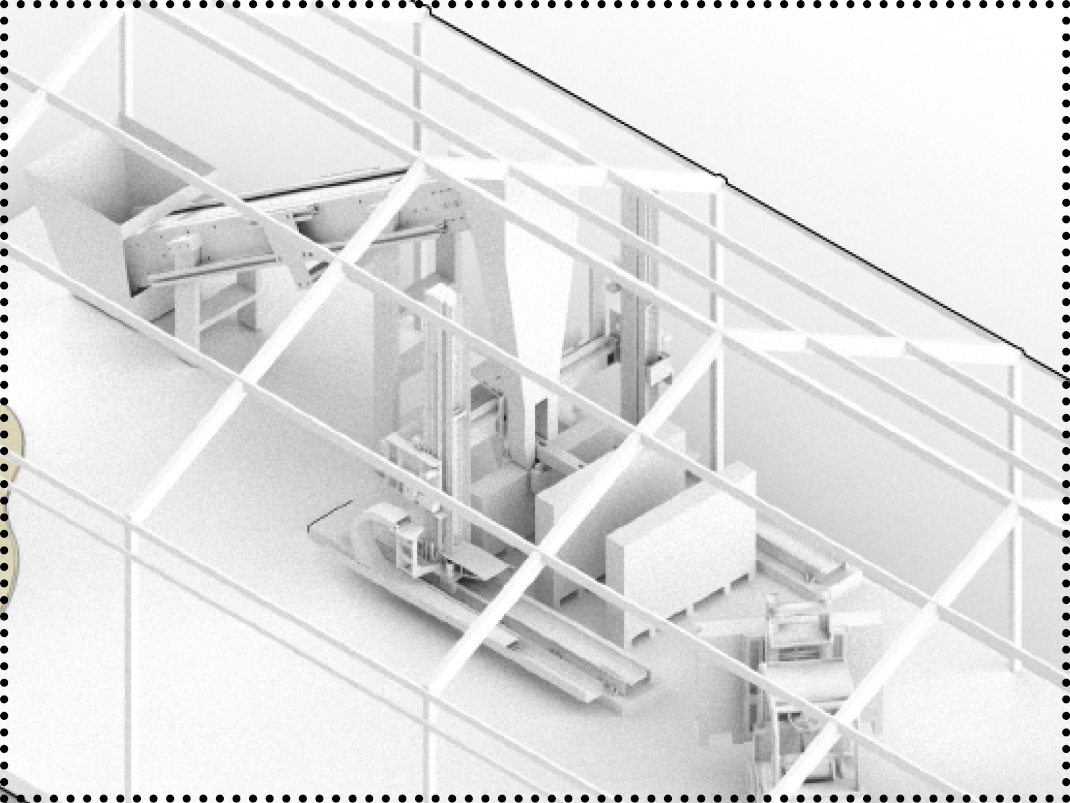
To achieve these goals, the project team is recreating real construction-site scenarios within the laboratory facilities of TU Braunschweig. This controlled yet realistic environment allows for systematic testing, adaptation, and optimization of the mobile fabrication setup. New equipment, prototypes, and process chains are being designed and evaluated to ensure practical feasibility for future on-site applications.
With this work, the project takes an important step toward transforming rammed earth into a digitally supported, highly efficient, and locally adaptable construction method.
[1] Gosslar, Joschua; Dorresteijn, Evelien; David, Martin; Leusmann, Thorsten; Dröder, Klaus; Lowke, Dirk; Kloft, Harald (2024): Digital Fabrication with Local Earthen Materials: The Relevance of Process Robustness. In Dirk Lowke, Niklas Freund, David Böhler, Friedrich Herding (Eds.): Fourth RILEM International Conference on Concrete and Digital Fabrication, vol. 53. Cham: Springer Nature Switzerland (RILEM Bookseries), pp. 415–422.
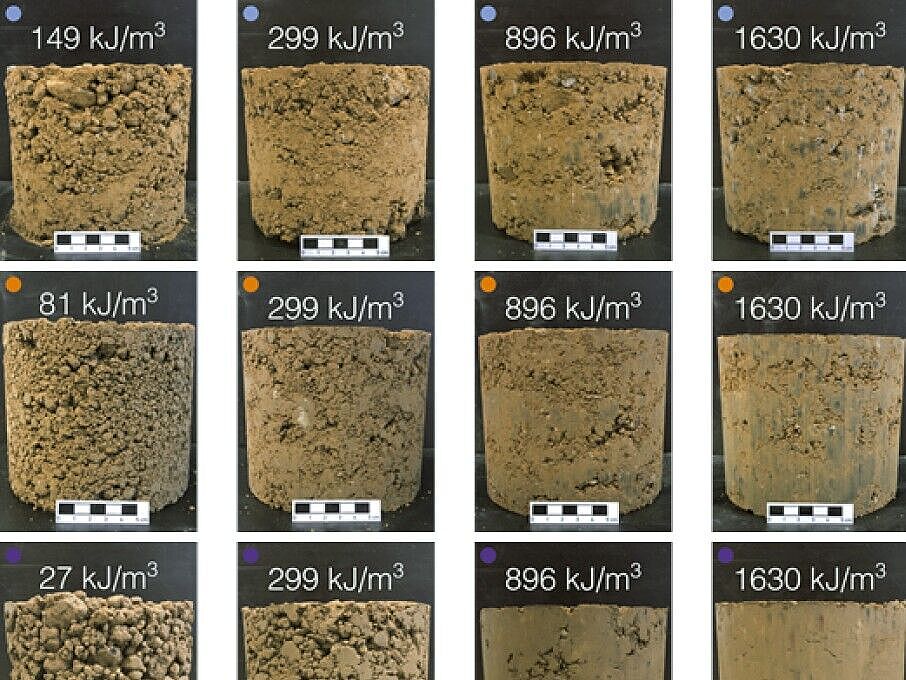
[2] Schmitz, Linus Paul†; Gosslar, Joschua†; Dorresteijn, Evelien; Lowke, Dirk; Kloft, Harald (2024): Experimental investigations on the compaction energy for a robotic rammed earth process. In Front. Built Environ. 10, Article 1363804. DOI: 10.3389/fbuil.2024.1363804
[3] Gosslar, Joschua; Dorresteijn, Evelien; David, Martin; Leusmann, Thorsten; Dröder, Klaus; Lowke, Dirk; Kloft, Harald (2024): Robotische Verarbeitung lokaler Erdmaterialien: Potenziale digitaler Fertigungsmethoden im Stampflehmbau. In Lehm 2024 – 9th International Conference on Building with Earth.
[4] Radiobeitrag im Deutschlandfunk [https://www.deutschlandfunk.de/alte-bautechniken-wiederbeleben-stampflehmroboter-dlf-081243ab-100.html]
[5] Beitrag auf Plattform Bayrische Ingenieurkammer Bau [https://www.bayika.de/de/aktuelles/meldungen/2023-09-28_Mit-dem-Stampflehm-Roboter-auf-die-Baustelle.php]
[6] Beitrag im VDI Fachbereich Bautechnik [https://www.ingenieur.de/fachmedien/bauingenieur/forschung-und-entwicklung/lehm-additiv-auf-der-baustelle-gestampft/#google_vignette]
[7] Beitrag im Magazin der TU Braunschweig [https://magazin.tu-braunschweig.de/pi-post/mit-dem-stampflehm-roboter-auf-die-baustelle/]

Related Research:
2025 Selective Robotic Rammed-Earth (sRRE)
2024 Spray Earth - TRR277 AMC A10 (FP2)
2019 Robot Aided Fabrication of Rammed Earth Elements
Related Teaching:
Related Demonstrators: