Beginn: Ab sofort
Art der Arbeit: Bachelorarbeit, Studienarbeit, Masterarbeit
Ansprechpartner: Julia Sprengel
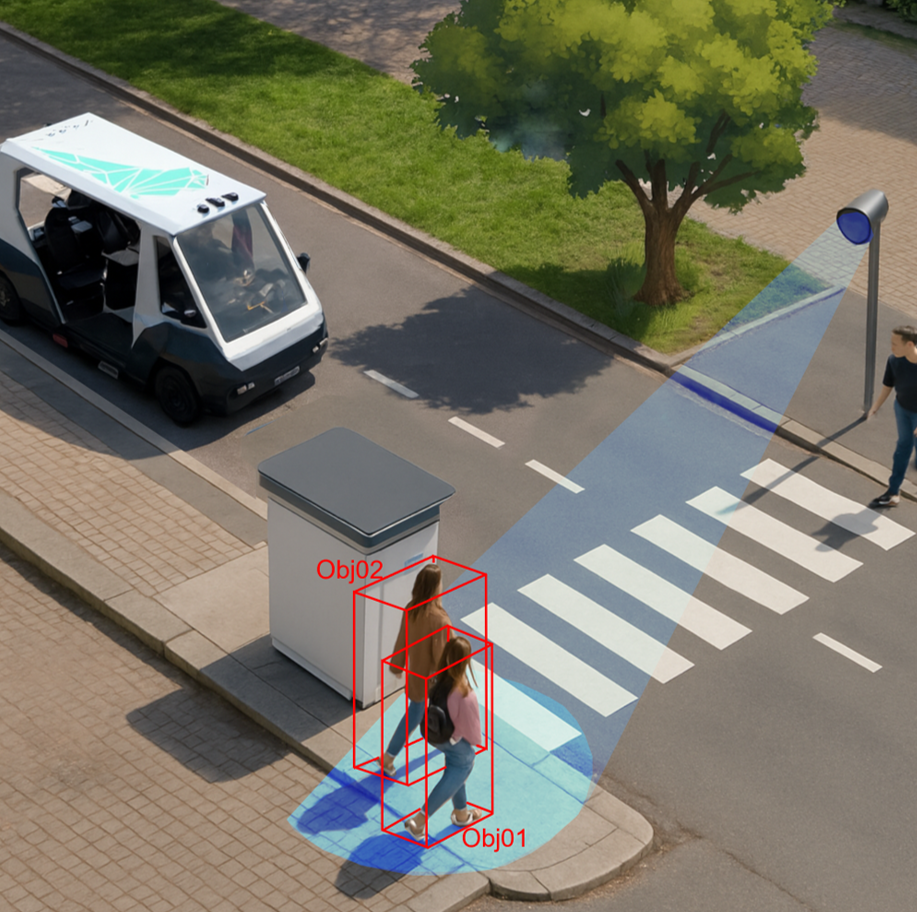
Wenn ein automatisiertes Fahrzeug sicher
unterwegs sein soll, muss es seine Umgebung
jederzeit richtig einschätzen. Die Sensoren am
Auto (Kamera, Radar, LiDAR) liefern dafür viel -
aber in der Praxis bleiben Lücken: verdeckte
Sicht an Kreuzungen, parkende Fahrzeuge,
enge Parkhäuser oder Rangiersituationen.
Stationäre Kameras an passenden Standorten
können wie ein zusätzliches „Auge“ wirken,
„um die Ecke“ schauen und so blinde Bereiche
reduzieren. Im Dauerbetrieb ändern sich
jedoch Bildlage und -qualität: Wind, Vibration,
Temperaturwechsel sowie Regen und Schmutz
können die Sicht verschlechtern; auch die
Übertragung kann schwanken. Ziel der Arbeit
ist ein Verfahren zur automatischen
Zustandsüberwachung, das solche
Abweichungen erkennt und passende
Reaktionen auslöst, damit die
Infrastrukturwahrnehmung dauerhaft
verlässlich bleibt.