Beginn: Ab sofort
Art der Arbeit: Bachelorarbeit, Studienarbeit, Masterarbeit
Ansprechpartner: Marius Westendorf
Immer aktuell: Wir suchen laufend Studierende, die ihre Thesis in diesem Bereich schreiben wollen.
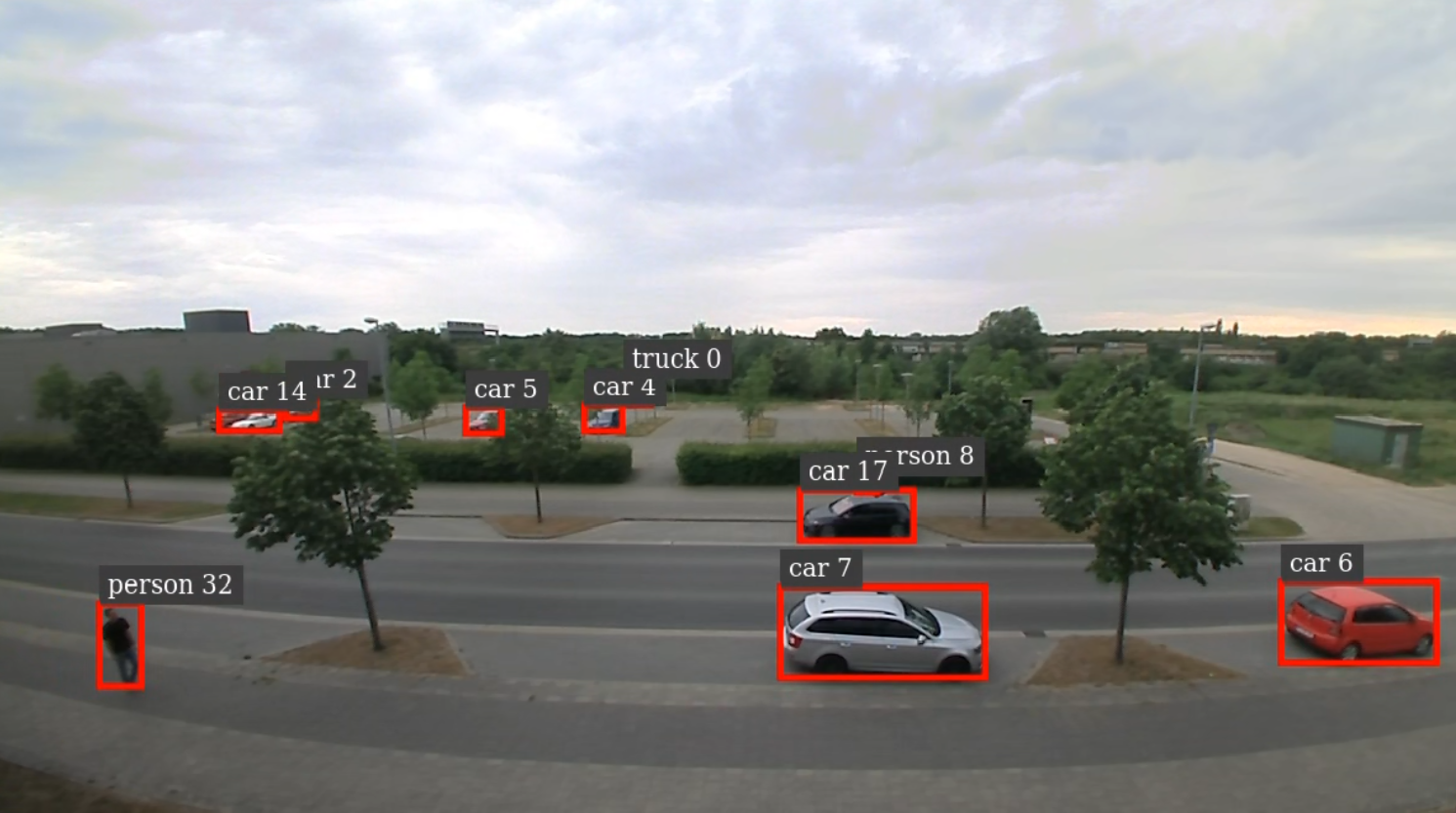
Die Fusion von intelligenter Infrastruktur und Fahrzeugperzeption stellt einen vielversprechenden Ansatz zur Verbesserung der Umfeldwahrnehmung im automatisierten Fahren dar. Kamerabasierte Verfahren in Kombination mit Deep-Learning-Methoden ermöglichen eine robuste Objekterkennung, -verfolgung sowie Posenschätzung in komplexen Verkehrsszenarien. Intelligente Infrastruktur – beispielsweise durch Sensorikmasten mit Kameras und weiteren Sensorkomponenten – kann dabei das Sichtfeld einzelner Fahrzeuge erweitern, zusätzliche Informationen bereitstellen und Redundanz schaffen. Beide Quellen der Wahrnehmung sind jedoch mit spezifischen Unsicherheiten und Herausforderungen verbunden, etwa durch variierende Umweltbedingungen, Bewegungsunschärfen oder eingeschränkte Sichtfelder. Ziel dieser Arbeit ist es daher, Deep-Learning-basierte Perzeptionsverfahren mit Sensordaten aus intelligenter Infrastruktur zu kombinieren, deren Unsicherheiten zu untersuchen und die Leistungsfähigkeit für automatisiertes Fahren zu bewerten. Die Arbeit umfasst hierzu folgende Aufgabenbereiche:
Literaturrecherche zu Normen und Reglementierungen intelligenter Infrastruktur sowie zum Einsatz von KI in Fahrfunktionen
Optimierung der Perzeptionsansätze durch Deep-Learning-Verfahren
Implementierung der Methoden in realen Sensorikmasten und Umgebungen
Untersuchung und quantitative Evaluierung der Ergebnisse sowie Einordnung der Ergebnisse in den Anwendungsfall des automatisierten Fahrens
Gute Programmierkenntnisse in C++ und Python
Analytisches Denkvermögen und ein hohes Maß an Lernbereitschaft
Selbstständige, strukturierte Arbeitsweise sowie Eigeninitiative