Beginn: Ab sofort
Art der Arbeit: Bachelorarbeit, Studienarbeit, Masterarbeit
Ansprechpartner: Julia Sprengel
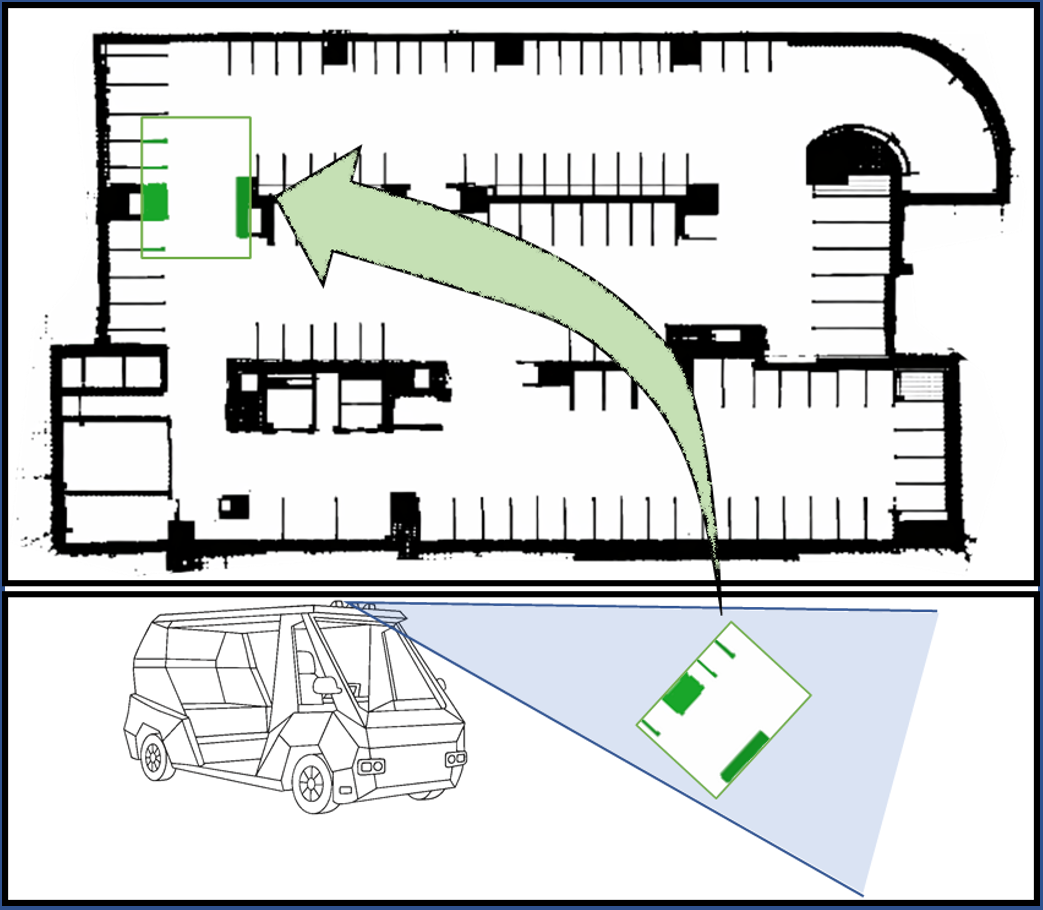
Autonome und hochautomatisierte Fahrzeuge
müssen ihre Pose im Raum jederzeit präzise
und robust bestimmen - auch dann, wenn
GNSS ungenau ist oder ausfällt, etwa in
Tunneln, Parkhäusern oder zwischen hohen
Gebäuden. LiDAR erfasst die Umgebung als
dichte 3D-Punktwolke und ermöglicht es, die
Fahrzeugbewegung und -position direkt aus
der Geometrie der Szene abzuleiten. Dazu
werden aktuelle Messungen mit passenden
Referenzdaten abgeglichen, um aus der
bestmöglichen Übereinstimmung die Pose zu
schätzen. Ziel der Arbeit ist die praktische
Umsetzung und Bewertung von Verfahren zur
LiDAR-basierten Lokalisierung auf Basis von
Punktwolkenabgleich, mit Fokus auf
Genauigkeit und Robustheit unter realistischen
Einsatzbedingungen.