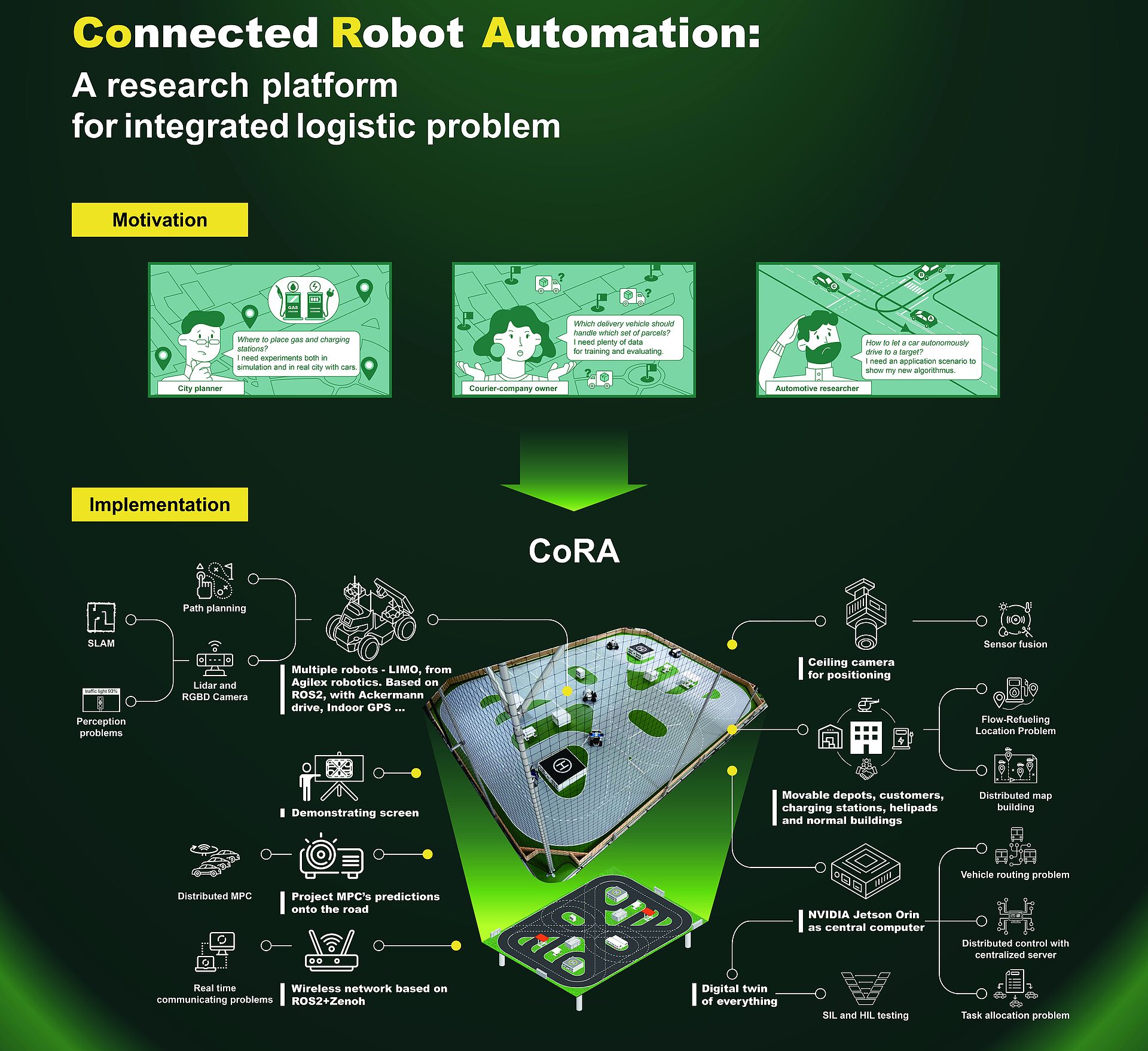
CoRA is a research platform developed by ITL, based on the most advanced theories, specifically designed for the field of logistics and transportation. It is a comprehensive platform that enables the study and demonstration of academic problems at the strategic, tactical, and operative levels.
Examples include: at the strategic level, the Flow Refueling Location Problem (FRLP), which focuses on determining the optimal placement of charging stations; at the tactical level, the Vehicle Routing Problem (VRP), which optimizes task assignments for transport vehicles; and at the operative level, distributed Model Predictive Control (DMPC), which coordinates multiple vehicles traveling along their assigned paths.
Autonomous-electric fleets promise leaner logistics yet still struggle with where to charge, how to assign tasks, and how to coordinate vehicles. CoRA (Connected Robot Automation) is an open platform that tackles these strategic, tactical, and operational gaps with distributed MPC and a unified hardware–software stack for perception, localisation, and planning. A mirrored digital twin lets every experiment run both physically and in simulation, turning classic facility-location and vehicle-routing formulations into fault-tolerant, scalable solutions for autonomous logistics.
Since 2025, the demonstrator has been receiving support from the air. With the flight of so-called micro-aerial vehicles (MAV) in the demonstrator, we offer researchable applications for the collaboration of drones and robots and the collective behavior of multimodal agents in terms of control theory, reactive task allocation and sophisticated mission planning in an heterogenous swarm deployed in a miniaturized world. Currently two custom-built 5' MAVs and a Crazyflie System from Bitcraze are part of the ITL Drone fleet. The 5' MAVs carry a powerfull onboard PC with an integrated GPU for data intensive tasks like online MPC and Computer Vision. The Crazyflies are easy to deploy platforms used for teaching and showcasing modern control theory. The small size allows for developing swarming algorithms for complex missions and distributed control on the miniaturized testbed. External Localization with centimeter-accuracy is provided by a Lighthouse positioning system.