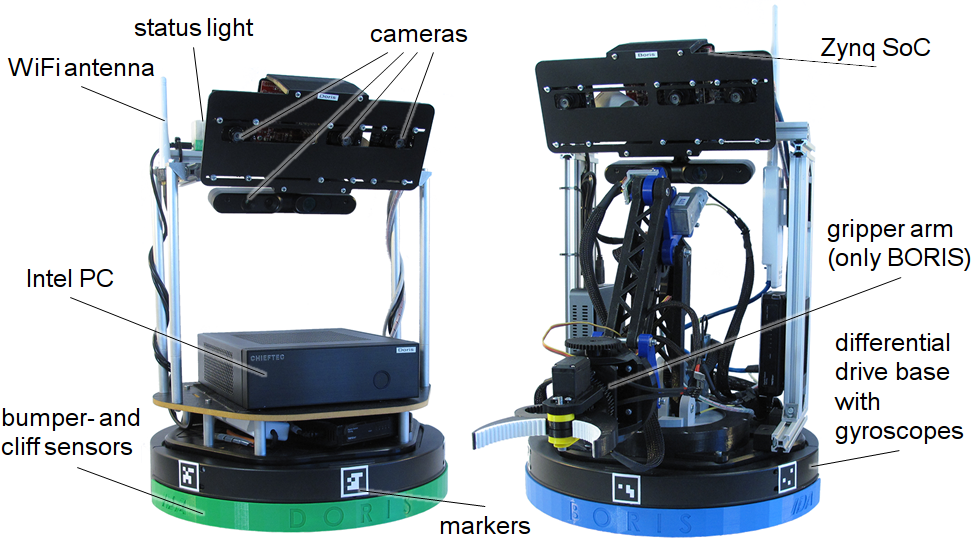
Zwei Roboter, ausgestattet mit Kameras und Greifern, kooperieren bei der Kartierung unbekannten Terrains sowie bei der Suche nach und der Manipulation von Objekten. Das verwendete eingebettete System setzt sich aus ARM-Prozessoren, einem rekonfigurierbaren IC (FPGA) und Speichern zusammen. Dies ist ein typischer Aufbau für neuere Raumfahrtmissionen. Die Besonderheit besteht in der automatischen Integration von Hardwarefunktionen in das rekonfigurierbare IC. Die Hardwarefunktionen umfassen einen schnellen Algorithmus zur Bildanalyse, eine redundante Architektur, die auch noch zuverlässige Operationen unter höherer Strahlenbelastung zulässt, sowie eine kooperative Funktion, die den Ausfall der Kamera eines der Roboter kompensiert. Beide Störungen werden im Demonstrator simuliert. Die begrenzten Ressourcen des FPGA können zeitgleich nur einen Teil der Funktionen ausführen. Die Integration erfordert dabei ein Layout der zugewiesenen Funktionen, das im zentralen Softwaremodul des CCC-Projekts, dem MCC, durchgeführt wird. Die zugehörige Laufzeitumgebung wird automatisch konfiguriert.
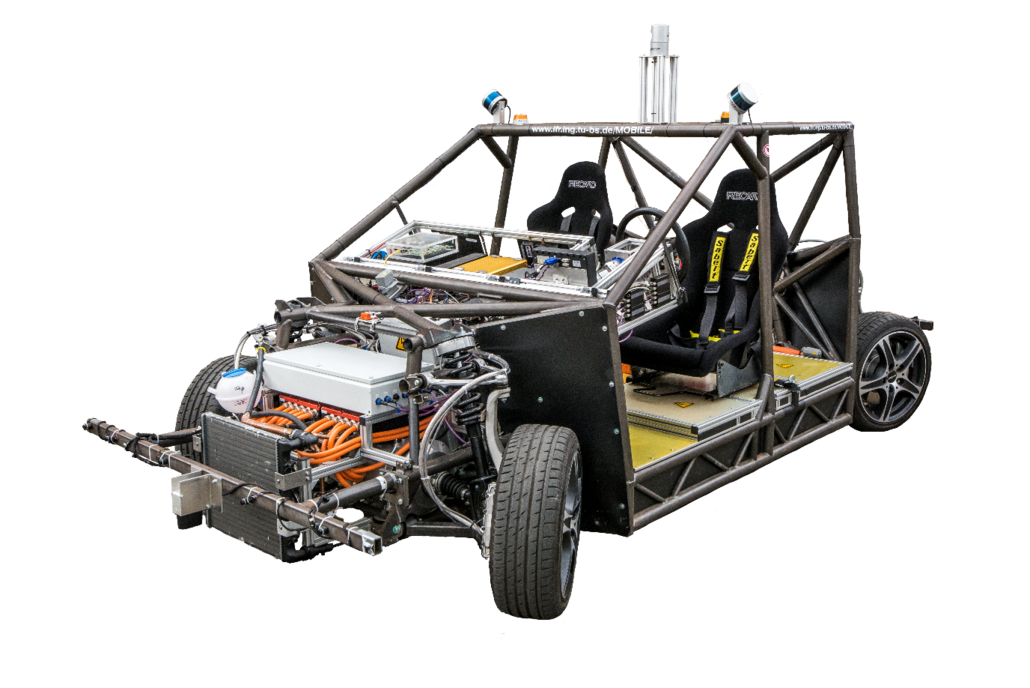
Dieser Demonstrator nutzt das in parallelen Arbeiten entstandene Experimentalfahrzeug MOBILE als Versuchsträger. Als Anwendungsfall wurde ein automatisiertes Ausweichmanöver ausgestaltet, für das MOBILE mit Sensorik zur Umfelderfassung ausgestattet wurde. Zudem wurden eine fehlertolerante modellprädiktive Trajektorienplanung und -regelung als notwendige Bestandteile der Fahrzeugautomatisierung implementiert. Für die Demonstration funktionaler Updates innerhalb eines bestehenden Systems wurde das Teilsystem zur gitterbasierten Umfeldwahrnehmung aus dem „Stadtpilot“-Projekt in das CCC-Framework portiert. Dies ermöglichte Applikations-Updates über den entwickelten MCC. Die Updatefähigkeit des Systems wurde anhand einer Umfeldwahrnehmung demonstriert, indem der Demonstrator mit einer Basisversion zur Wahrnehmung statischer Objekte ausgestattet wurde. Unter Nutzung der CCC-Updatemechanismen wurde ein funktionales Systemupdate durchgeführt, so dass das System anschließend zusätzlich in der Lage war, Fahrbahnmarkierungen wahrzunehmen.
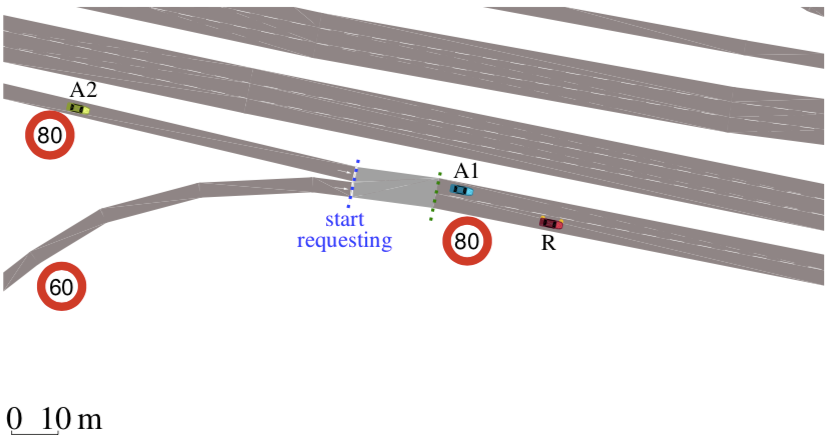
Dieser Demonstrator hatte insbesondere das Ziel zu zeigen, wie in CCC entwickelte und untersuchte Mechanismen zur Fahrzeug-Fahrzeug-Kommunikation (V2V) genutzt werden können und wie dabei ein eigens entworfenes Vereinbarungsprotokoll angewendet werden kann, um koordinierte Manöverwechsel zu ermöglichen. Dabei wird das jeweilige Verhalten beobachtet und es wird eine Absicherung bzgl. Änderungen bei einzelnen Partnern erzielt. Zudem sollten die sich dabei ergebenden Systemeigenschaften gezeigt werden. Wenn autonome Fahrzeuge per V2V verschiedene Informationen untereinander austauschen, dann können sie hiermit Fahrsicherheit und Effizienz verbessern. So können geplante Manöver anderen Fahrzeugen mitgeteilt werden, bspw. das Einfädeln an der Auffahrt einer Autobahn. Andere Fahrzeuge können darauf reagieren und ggf. den Verkehrsfluss optimieren sowie das Unfallrisiko verringern. Solche Szenarien wurden in CCC diskutiert und erarbeitet. Der D3-Demonstrator zeigt mittels eines simulativen Ansatzes, wie solch eine Manöverkoordination erfolgt und visualisiert das Fahrverhalten jedes einzelnen Fahrzeugs. Es wird ebenso verdeutlicht, dass durch eine V2V-basierte Manöverkoordination die Verkehrseffizienz verbessert werden kann. Das Kommunikationsprotokoll ist dabei so gestaltet, dass widersprüchliche Entscheidungen von Fahrzeugen verhindert werden.