
Der derzeit eingesetzte Roboter HELIOS Evo wurde 2019 im Rahmen einer Projektarbeit umgebaut. Dabei wurde das Fahrzeugchassis wie beim Vorgänger des HELIOS Evo belassen. Der Aufbau wurde neu entwickelt, um den, im Rahmen der Projektarbeit, entwickelten Heckkraftheber zu integrieren. Das Fahrzeug wird von einem 250-Watt-Motor angetrieben. Dieser treibt ein Zentraldifferential an, welches wiederum die beiden Achsdifferentiale antreibt. Als Lenkung kommt eine Ackermannlenkung zum Einsatz, bei welcher die Achsen separat angesteuert werden können.
Für die autonome Navigation des Roboters werden zwei LiDAR-Sensoren der Firma Sick eingesetzt. Um die Navigation zu erleichtern sind diese Sensoren auf zwei verschiedenen Ebenen angebracht. Für die Unkrauterkennung wird eine Intel Realsense eingesetzt, die von oben auf die Reihen blickt. Zusätzlich kann eine weitere Realsense zur Navigation eingesetzt werden. Die Datenverarbeitung erfolgt durch einen PC, der die Daten der Sensoren in Befehle für die Bewegungen umwandelt. Der entsprechende Code wird mit dem Framework ROS2 (Robot Operating System) und C++/Python geschrieben.
Als Stromversorgung werden derzeit eigens entwickelte Li-Ion Akkus verwendet, die eine nominale Ausgangsspannung von 25.2 Volt liefern. Ein Netzteil transformiert die verschiedenen benötigten Spannungen für die unterschiedlichen Anwendungen. Die dafür verwendeten Platinen wurden vom Team speziell dafür entwickelt und bestückt.
Das Team versucht stets alles an benötigten Hardware- und Softwarekomponenten eigenständig zu entwickeln und zu fertigen. Von den Kabeln, über die Platinen, bis zum Gehäuse und der benötigten Software.
Modul zur Injektion von Cultan Dünger
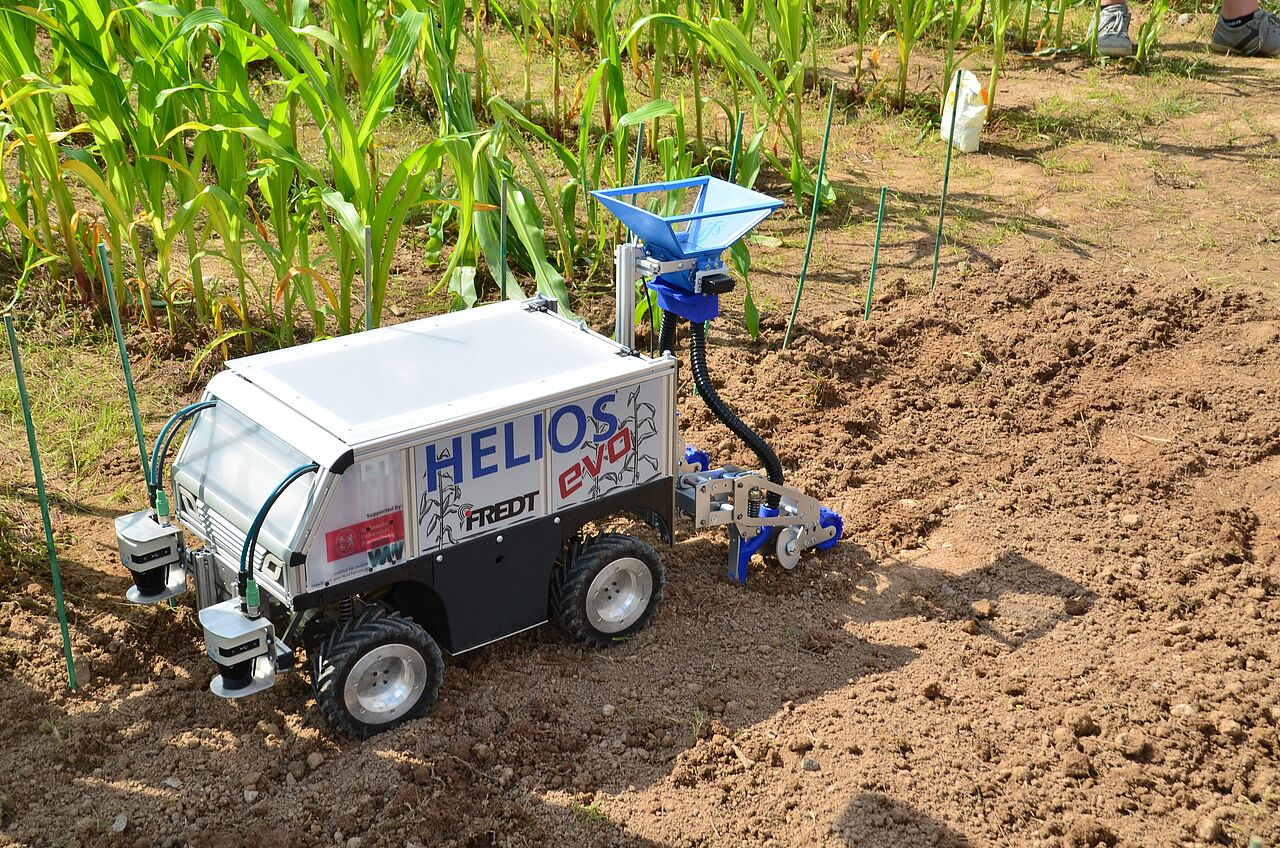
Modul für die Gleichstandssaat von Mais
Modul zur chemischen Unkrautbekämpfung
Modul zur mechanischen Unkrautbekämpfung